Would VHF radar+two stage IR SAM against stealth fighter?
- Senior member

- Posts: 485
- Joined: 05 Aug 2015, 21:11
Title
The problem with VHF radars is the relative inaccuracy. You will likely get kms off of distance. With radars seekers they would have trouble locking on unless it is guided very accuractly with datalinks. And with IR seekers they cannot measure range.
However, with modern two-stage missiles or dual pulse missiles that can burn at terminal phase, this may solve the problem. VHF radar could throw the missile close enough lets say by maybe 10 km of inaccuracy, however this may be enough, for an agile missile to use an IR seeker to find the target, and use the second burn to go straight at at target. No need to find range since with a rocket motor you could just move on bearing like a IR missiled fired at WVR.
Thoughts?
The problem with VHF radars is the relative inaccuracy. You will likely get kms off of distance. With radars seekers they would have trouble locking on unless it is guided very accuractly with datalinks. And with IR seekers they cannot measure range.
However, with modern two-stage missiles or dual pulse missiles that can burn at terminal phase, this may solve the problem. VHF radar could throw the missile close enough lets say by maybe 10 km of inaccuracy, however this may be enough, for an agile missile to use an IR seeker to find the target, and use the second burn to go straight at at target. No need to find range since with a rocket motor you could just move on bearing like a IR missiled fired at WVR.
Thoughts?
- Elite 4K

- Posts: 4474
- Joined: 23 Oct 2008, 15:22
VHF isn't gonna get a missile, IR or otherwise, within detection/engagement range.
- Elite 5K

- Posts: 5269
- Joined: 13 Mar 2013, 08:31
- Location: Finland
There are several problems with this:
1. Like already noted, VHF/UHF radar have pretty poor resolution. Another problem is that they have poor resolution in 3 dimensions, meaning also height resolution. So this means the missile search volume would be pretty large especially at longer ranges from radar.
2. VHF/UHF radar have quite long time between track updates as they use very large rotating antennas. This is usually in the region of 5 to 20 seconds which makes the real resolution even worse as any change in target speed or heading makes the volume a lot larger.
3. IR missiles have rather narrow Field of View and thus it takes a long time to search a large volume. Of course FoV could be wider, but then range and resolution suffer immediately. Missile going Mach 3+ would have very limited time to search the volume before it could no longer engage the target even if it detected it.
4. VHF/UHF radars are very large and cumbersome systems that are pretty easily detected and geolocated as they are powerful systems with narrow bandwidth (due to low frequency used). Stealth fighters like F-22 and F-35 would very likely know where they are and what they were doing. F-117 was brought down because it had no knowledge about the existence of enemy radars.
Basically it could be done and it could work in some cases, but it's likely not very effective overall especially against fighters with modern ESM/EW systems which could detect the radar. Even if radar could operate freely, the kill probability would be pretty low due to low radar resolution and slow volume search speed for missile seeker. There are a lot of reasons why VHF/UHF radars have not been used for direct target engagements except some anti cruise missile tests. VHF/UHF radars could be used to cue engagement radars though and using sensor fusion techniques could be more of a threat.
1. Like already noted, VHF/UHF radar have pretty poor resolution. Another problem is that they have poor resolution in 3 dimensions, meaning also height resolution. So this means the missile search volume would be pretty large especially at longer ranges from radar.
2. VHF/UHF radar have quite long time between track updates as they use very large rotating antennas. This is usually in the region of 5 to 20 seconds which makes the real resolution even worse as any change in target speed or heading makes the volume a lot larger.
3. IR missiles have rather narrow Field of View and thus it takes a long time to search a large volume. Of course FoV could be wider, but then range and resolution suffer immediately. Missile going Mach 3+ would have very limited time to search the volume before it could no longer engage the target even if it detected it.
4. VHF/UHF radars are very large and cumbersome systems that are pretty easily detected and geolocated as they are powerful systems with narrow bandwidth (due to low frequency used). Stealth fighters like F-22 and F-35 would very likely know where they are and what they were doing. F-117 was brought down because it had no knowledge about the existence of enemy radars.
Basically it could be done and it could work in some cases, but it's likely not very effective overall especially against fighters with modern ESM/EW systems which could detect the radar. Even if radar could operate freely, the kill probability would be pretty low due to low radar resolution and slow volume search speed for missile seeker. There are a lot of reasons why VHF/UHF radars have not been used for direct target engagements except some anti cruise missile tests. VHF/UHF radars could be used to cue engagement radars though and using sensor fusion techniques could be more of a threat.
- Senior member
- Posts: 485
- Joined: 05 Aug 2015, 21:11
hornetfinn wrote:There are several problems with this:
1. Like already noted, VHF/UHF radar have pretty poor resolution. Another problem is that they have poor resolution in 3 dimensions, meaning also height resolution. So this means the missile search volume would be pretty large especially at longer ranges from radar.
2. VHF/UHF radar have quite long time between track updates as they use very large rotating antennas. This is usually in the region of 5 to 20 seconds which makes the real resolution even worse as any change in target speed or heading makes the volume a lot larger.
3. IR missiles have rather narrow Field of View and thus it takes a long time to search a large volume. Of course FoV could be wider, but then range and resolution suffer immediately. Missile going Mach 3+ would have very limited time to search the volume before it could no longer engage the target even if it detected it.
4. VHF/UHF radars are very large and cumbersome systems that are pretty easily detected and geolocated as they are powerful systems with narrow bandwidth (due to low frequency used). Stealth fighters like F-22 and F-35 would very likely know where they are and what they were doing. F-117 was brought down because it had no knowledge about the existence of enemy radars.
Basically it could be done and it could work in some cases, but it's likely not very effective overall especially against fighters with modern ESM/EW systems which could detect the radar. Even if radar could operate freely, the kill probability would be pretty low due to low radar resolution and slow volume search speed for missile seeker. There are a lot of reasons why VHF/UHF radars have not been used for direct target engagements except some anti cruise missile tests. VHF/UHF radars could be used to cue engagement radars though and using sensor fusion techniques could be more of a threat.
1. 2. But isn't resolution not incredibly bad? We aren't talking about 10 km off target? All we need is a missile to fly close enough to ignite the second stage.
3. From what I know IR missiles don't need huge FoVs if it's WVR.
4. True that.
- Elite 4K
- Posts: 4474
- Joined: 23 Oct 2008, 15:22
VHF radar can't get a missile within 10km of a target, which is why nobody is designing air defense systems around VHF. VHF is sufficient to provide early warning, that something is out there, but a weapons grade track is impossible. As has been mentioned, it can't provide the 3D information necessary for a track, it has a slow refresh rate, and a resolution that's worse than within 10km. Aside from the radar limits, there are also missile limits. Think about how important heading, speed, altitude, etc.... are to missile range. Without high precision, the missile simply won't be within its WEZ much less NEZ.
- Elite 5K
- Posts: 5269
- Joined: 13 Mar 2013, 08:31
- Location: Finland
armedupdate wrote:1. 2. But isn't resolution not incredibly bad? We aren't talking about 10 km off target? All we need is a missile to fly close enough to ignite the second stage.
3. From what I know IR missiles don't need huge FoVs if it's WVR.
4. True that.
It is pretty bad for missile guidance. Generally missiles need very good "weapons grade" target tracking for successful engagement like wrightwing said. Let's think about it for a moment:
VHF radar detects a target say 100 km away from the radar. Each detection has measurement accuracy of say 1000 m in azimuth, about 100 m in range and 3000 m in altitude and detection is updated every 6 seconds (pretty fast for VHF radar). These would be pretty good specs for VHF radar and range is just 100 km. What all this means is that target doing 250 m/s is going to move abut 1500 m between consecutive detections and there is going to be pretty large errors (within the measurement accuracy) in coordinates of each detection on average. If the target is going in straight line, it's fairly easy to predict where it will be next. However, when it's maneuvering even slightly, it's getting a whole lot more difficult with increasing errors in predicting where it will be. Remember that the radar must guide the missile to interception point which is always going to be in the future and missile is going to predicted point.Because of the aforementioned accuracy and slow update interval there is going to be huge uncertainty volume where the missile has to search for a target. For example just the altitude uncertainty is going to be several kilometers in best case.
Target speed calculation is also very tricky due to those errors and slow updates. Say there is 500 m error (half the measurement accuracy) in azimuth in two consecutive detections and target actually moves 1500 m between those two detections. Real speed is 250 m/s but radar could calculate the speed to be anything between 83 m/s to 416 m/s depending on error direction in two detections. Radar would naturally calculate the speed over say 10-20 detections, but then any acceleration or deceleration by the target would instantly create pretty large error until the tracking algorithm could follow. That is when radar does not miss any detections (not very uncommon especially in low frequency radars) and smoothly tracks the target. If it misses just one detection, the uncertainty volume instantly multiplies.
Basically low frequency radar is fine for targets flying straight and level at constant speed, but maneuvers and changes in speed are serious problem for them. That's why they are used for early warning and general surveillance and not for missile guidance.
- Elite 5K
- Posts: 5269
- Joined: 13 Mar 2013, 08:31
- Location: Finland
skyward wrote:3. From what I know IR missiles don't need huge FoVs if it's WVR.
That is because the IR missiles is being told where to look by the fighter before launch.
Exactly. Missile seeker effective range and resolution are also inversely proportional to instantaneous FoV (IFoV). Missile seeker with 1 deg IFoV would pretty much have 90 times longer range than one with 90 deg IFoV. Usually IR missiles have seekers with IFoV in the region of 2-5 degrees for having enough range and resolution while seeing large enough area to search for target (with high accuracy cueing) and target tracking to work effectively.
- Active Member

- Posts: 201
- Joined: 13 Nov 2009, 15:32
Hornetfinn - I agree with your description of challenges faced by the users of VHF/UHF radars.
Despite this in recent years we can observe renaissance of UHF radars.
Just to name few : AN/APY-9, MEADS UHF Surveillance Radar, numerous Israeli, Polish, Ukrainian, Chinese and Russian surveillance radars.
Despite this in recent years we can observe renaissance of UHF radars.
Just to name few : AN/APY-9, MEADS UHF Surveillance Radar, numerous Israeli, Polish, Ukrainian, Chinese and Russian surveillance radars.
- Active Member
- Posts: 179
- Joined: 11 Sep 2018, 20:10
- Location: Spain
hornetfinn wrote:armedupdate wrote:1. 2. But isn't resolution not incredibly bad? We aren't talking about 10 km off target? All we need is a missile to fly close enough to ignite the second stage.
3. From what I know IR missiles don't need huge FoVs if it's WVR.
4. True that.
It is pretty bad for missile guidance. Generally missiles need very good "weapons grade" target tracking for successful engagement like wrightwing said. Let's think about it for a moment:
VHF radar detects a target say 100 km away from the radar. Each detection has measurement accuracy of say 1000 m in azimuth, about 100 m in range and 3000 m in altitude and detection is updated every 6 seconds (pretty fast for VHF radar). These would be pretty good specs for VHF radar and range is just 100 km. What all this means is that target doing 250 m/s is going to move abut 1500 m between consecutive detections and there is going to be pretty large errors (within the measurement accuracy) in coordinates of each detection on average. If the target is going in straight line, it's fairly easy to predict where it will be next. However, when it's maneuvering even slightly, it's getting a whole lot more difficult with increasing errors in predicting where it will be. Remember that the radar must guide the missile to interception point which is always going to be in the future and missile is going to predicted point.Because of the aforementioned accuracy and slow update interval there is going to be huge uncertainty volume where the missile has to search for a target. For example just the altitude uncertainty is going to be several kilometers in best case.
Target speed calculation is also very tricky due to those errors and slow updates. Say there is 500 m error (half the measurement accuracy) in azimuth in two consecutive detections and target actually moves 1500 m between those two detections. Real speed is 250 m/s but radar could calculate the speed to be anything between 83 m/s to 416 m/s depending on error direction in two detections. Radar would naturally calculate the speed over say 10-20 detections, but then any acceleration or deceleration by the target would instantly create pretty large error until the tracking algorithm could follow. That is when radar does not miss any detections (not very uncommon especially in low frequency radars) and smoothly tracks the target. If it misses just one detection, the uncertainty volume instantly multiplies.
Basically low frequency radar is fine for targets flying straight and level at constant speed, but maneuvers and changes in speed are serious problem for them. That's why they are used for early warning and general surveillance and not for missile guidance.
Very good explantion Hornetfinn.
I have a doubt, if for example, we can use a VHF radar and we have for example a adquisition box of 3-4 kms on accuracy, is it impossible to guide a missile enough near for in terminal phase the internal seeker radar of the missile to track and engage the stealth target?
S-300 have very big missiles which maybe have enough big radar seeker for helping to VHF radar in terminal phase to track himself the stealth fighter...
Of course, we do not know exactly which data russian missile seekers have...but maybe 4-5 kms detection range against VLO is possible.
https://aeropathfinder.blogspot.com/
-

- Elite 1K

- Posts: 1870
- Joined: 31 Dec 2015, 05:35
- Location: Australia
Below wavelengths of about 1 meter (FM) propagation is altered by things like ducting, curvature of Earth, temperature difference, topography and/or building reflection scattering or reverberation that affects directionality of signals. With VHF (6 meter) and OTHR HF bands (<10 meters) you also have the continuous dynamic variation in properties of the Ionosphere, altering signal quality, gain and range resolution.
That can be calibrated and corrected for via having active beacons (providing soundings) or else pulse reflectors (such as a small island or reef outcrop) situated all across the footprint region of an OTHR, so the returned HF signal can be corrected for with input from these known locations of emitters and reflectors. Thus improving the contact location accuracy as conditions alter, and also informing what the conditions are, and how they're changing, when, where, and by how much. Thus how much to correct and interpolate for across the whole region. The result is the OTHR data can remain usefully accurate even with degraded conditions.
So could you likewise do the same at VHF wavelengths using the precisely known locations of disposable or else recoverable drones whose location you do know during every pulse update, and act as VHF emitter beacons or reflectors right across the scan volume of your VHF radars. Thus improving the calibration accuracy against a detected VLO bogie?
Thus the drones use SATCOM to transmit their own 3D-location and their vector, to inform every pulse returned back to the radar's processor, to separately calibrate each regional return pulse with the known beacon location data.
Now add a second or even third VHF radar to provide coverage of the same scan volume from other viewpoints for better combined angular resolution on any VLO bogie contact. Now a pulse hits the contact every 2 seconds, so any dropped pulse does not degrade location track much, it is quickly recovered, and all three radars are able to sharpen their accuracy using the drone locations and vectors, and their own triangulation of these sharper calibrated returned signals from each radar.
Then fuse and resolve a higher-resolution location for the VLO bogie.
Seems to me the location and likely vector (range) of the bogie is going to be significantly improved by doing that.
Then you get the nearest F-35 to launch a MALD to approach the VLO bogie and try to obtain a relative precision position for it. This location with respect to the MALD's known location is then relayed back via SATCOM, or else is embedded with in its own VHF beacon pulse or datalink and is relayed to all other drones, all other MALDs, and to all VHF radars, and all other F-35s.
So the nearest flight of 4 x F-35A now approaches in wide-open formation (another backs it up) towards the most likely area and they do a combined 4 x EOTS level IRST scan of the sky to locate and PID the VLO bogie(s), before the bogie(s) can counter-detect the F-35s or else eliminate the MALD. The bogie could then try to avoid the MALD, but the MALD follows and converges on it, or else a 'loyal wingman' does it.
It seems to me VHF is going to quickly lead to MALD detection/location then an EOTS PID, and a target-grade IRST data stream, for a high-PK passive BVR launch and fly-out, against a declared Bandit that doesn't necessarily know it's been engaged, or even targeted yet.
I think that is how an OPFOR would seek to exploit VHF EW ground systems and J-20 against an F-35 flight, but which VHF radars would be a very high-priority target and a (relatively) immobile system, so a very temporary anti-stealth capability would exist in the opening minutes, that could potentially engage an F-35 ... until jamming occurs.
That can be calibrated and corrected for via having active beacons (providing soundings) or else pulse reflectors (such as a small island or reef outcrop) situated all across the footprint region of an OTHR, so the returned HF signal can be corrected for with input from these known locations of emitters and reflectors. Thus improving the contact location accuracy as conditions alter, and also informing what the conditions are, and how they're changing, when, where, and by how much. Thus how much to correct and interpolate for across the whole region. The result is the OTHR data can remain usefully accurate even with degraded conditions.
So could you likewise do the same at VHF wavelengths using the precisely known locations of disposable or else recoverable drones whose location you do know during every pulse update, and act as VHF emitter beacons or reflectors right across the scan volume of your VHF radars. Thus improving the calibration accuracy against a detected VLO bogie?
Thus the drones use SATCOM to transmit their own 3D-location and their vector, to inform every pulse returned back to the radar's processor, to separately calibrate each regional return pulse with the known beacon location data.
Now add a second or even third VHF radar to provide coverage of the same scan volume from other viewpoints for better combined angular resolution on any VLO bogie contact. Now a pulse hits the contact every 2 seconds, so any dropped pulse does not degrade location track much, it is quickly recovered, and all three radars are able to sharpen their accuracy using the drone locations and vectors, and their own triangulation of these sharper calibrated returned signals from each radar.
Then fuse and resolve a higher-resolution location for the VLO bogie.
Seems to me the location and likely vector (range) of the bogie is going to be significantly improved by doing that.
Then you get the nearest F-35 to launch a MALD to approach the VLO bogie and try to obtain a relative precision position for it. This location with respect to the MALD's known location is then relayed back via SATCOM, or else is embedded with in its own VHF beacon pulse or datalink and is relayed to all other drones, all other MALDs, and to all VHF radars, and all other F-35s.
So the nearest flight of 4 x F-35A now approaches in wide-open formation (another backs it up) towards the most likely area and they do a combined 4 x EOTS level IRST scan of the sky to locate and PID the VLO bogie(s), before the bogie(s) can counter-detect the F-35s or else eliminate the MALD. The bogie could then try to avoid the MALD, but the MALD follows and converges on it, or else a 'loyal wingman' does it.
It seems to me VHF is going to quickly lead to MALD detection/location then an EOTS PID, and a target-grade IRST data stream, for a high-PK passive BVR launch and fly-out, against a declared Bandit that doesn't necessarily know it's been engaged, or even targeted yet.
I think that is how an OPFOR would seek to exploit VHF EW ground systems and J-20 against an F-35 flight, but which VHF radars would be a very high-priority target and a (relatively) immobile system, so a very temporary anti-stealth capability would exist in the opening minutes, that could potentially engage an F-35 ... until jamming occurs.
Accel + Alt + VLO + DAS + MDF + Radial Distance = LIFE . . . Always choose Stealth
- Active Member
- Posts: 179
- Joined: 11 Sep 2018, 20:10
- Location: Spain
element1loop wrote:Below wavelengths of about 1 meter (FM) propagation is altered by things like ducting, curvature of Earth, temperature difference, topography and/or building reflection scattering or reverberation that affects directionality of signals. With VHF (6 meter) and OTHR HF bands (<10 meters) you also have the continuous dynamic variation in properties of the Ionosphere, altering signal quality, gain and range resolution.
That can be calibrated and corrected for via having active beacons (providing soundings) or else pulse reflectors (such as a small island or reef outcrop) situated all across the footprint region of an OTHR, so the returned HF signal can be corrected for with input from these known locations of emitters and reflectors. Thus improving the contact location accuracy as conditions alter, and also informing what the conditions are, and how they're changing, when, where, and by how much. Thus how much to correct and interpolate for across the whole region. The result is the OTHR data can remain usefully accurate even with degraded conditions.
So could you likewise do the same at VHF wavelengths using the precisely known locations of disposable or else recoverable drones whose location you do know during every pulse update, and act as VHF emitter beacons or reflectors right across the scan volume of your VHF radars. Thus improving the calibration accuracy against a detected VLO bogie?
Thus the drones use SATCOM to transmit their own 3D-location and their vector, to inform every pulse returned back to the radar's processor, to separately calibrate each regional return pulse with the known beacon location data.
Now add a second or even third VHF radar to provide coverage of the same scan volume from other viewpoints for better combined angular resolution on any VLO bogie contact. Now a pulse hits the contact every 2 seconds, so any dropped pulse does not degrade location track much, it is quickly recovered, and all three radars are able to sharpen their accuracy using the drone locations and vectors, and their own triangulation of these sharper calibrated returned signals from each radar.
Then fuse and resolve a higher-resolution location for the VLO bogie.
Seems to me the location and likely vector (range) of the bogie is going to be significantly improved by doing that.
Then you get the nearest F-35 to launch a MALD to approach the VLO bogie and try to obtain a relative precision position for it. This location with respect to the MALD's known location is then relayed back via SATCOM, or else is embedded with in its own VHF beacon pulse or datalink and is relayed to all other drones, all other MALDs, and to all VHF radars, and all other F-35s.
So the nearest flight of 4 x F-35A now approaches in wide-open formation (another backs it up) towards the most likely area and they do a combined 4 x EOTS level IRST scan of the sky to locate and PID the VLO bogie(s), before the bogie(s) can counter-detect the F-35s or else eliminate the MALD. The bogie could then try to avoid the MALD, but the MALD follows and converges on it, or else a 'loyal wingman' does it.
It seems to me VHF is going to quickly lead to MALD detection/location then an EOTS PID, and a target-grade IRST data stream, for a high-PK passive BVR launch and fly-out, against a declared Bandit that doesn't necessarily know it's been engaged, or even targeted yet.
I think that is how an OPFOR would seek to exploit VHF EW ground systems and J-20 against an F-35 flight, but which VHF radars would be a very high-priority target and a (relatively) immobile system, so a very temporary anti-stealth capability would exist in the opening minutes, that could potentially engage an F-35 ... until jamming occurs.
Of course, if we have a Integraded Air Defence would be more easy, but we will have more VHF radars, which they are emiting and anything out there emitting inmediately will be an easy target.
An of course will exist jamming too.
For this, my question was when it is only 1 Air defence system.
¿Sombody knows what range has the seeker of typical missiles from S.400 for a determined RCS?
https://aeropathfinder.blogspot.com/
- Elite 5K
- Posts: 5269
- Joined: 13 Mar 2013, 08:31
- Location: Finland
falcon.16 wrote:I have a doubt, if for example, we can use a VHF radar and we have for example a adquisition box of 3-4 kms on accuracy, is it impossible to guide a missile enough near for in terminal phase the internal seeker radar of the missile to track and engage the stealth target?
S-300 have very big missiles which maybe have enough big radar seeker for helping to VHF radar in terminal phase to track himself the stealth fighter...
Of course, we do not know exactly which data russian missile seekers have...but maybe 4-5 kms detection range against VLO is possible.
If we assume that VHF radar can track the stealth target continuosly can guide the missile against such an acquisition box, there are still serious problems for the missile. It still needs to search for the target itself and then lock on to it and guide itself against the target. If the detection range is only 4-5 km, then the missile would be very close to the search box and has to scan very wide angles. If we say that the detection range is 5 km and acquisition box is 3 km wide, then the missile would have to scan something like +-15 degrees in both azimuth and elevation. This takes rather long time with current seeker technology and the missile would very likely be too close to maneuver effectively even if it manages to find and track the target. Even finding the target would have fairly low probability of success. AESA seeker would have better probability of success. IR seekers would have similar problems as current mechanically scanned radar seekers. It would either have short range with wide field of view optics or long search time with narrow field of view optics.
I think either the acquisition box needs to be shrunk significantly or seeker technology improved tremendously before such tactics would work well. VLO stealth makes things pretty difficult for missile engagement in any case.
- Active Member
- Posts: 131
- Joined: 23 Jul 2019, 17:09
Modern VHF systems work cooperatively with UHF and shorter band radars, like seen in Nebo-M. The longer wavelength radar makes the coarse target detection and the high-power, high frequency ones get an improved quality data based on that.
Nevertheless, VHF radars with modern processing technology have accuracy like 200 m range, 20 arcmin azimuth and 1.5º in elevation, better even in the case of higher arrays like 55Zh6 Nebo-U. From APA:
Nebo-M is claimed to have an instrumental range of 1800 km and very long distance detection of small targets:
Regarding the seekers, AESA models are starting to come online, see performance below for a small (100 mm diameter) one for MRAAMs. Scanning fast is not a problem for them of course. And then, switching on the seeker late is good to reduce the reaction time of the attacked plane, so a very early detection by the active seeker would also not be desirable.
As to how easy it is to hunt down a proficiently managed AD unit, the story of Zoltan Dani's 3rd missile detachment of the 250th Yugoslav Air Defense Battalion under overwhelming NATO air superiority and constant SEAD raids is a well known but still recommended read.
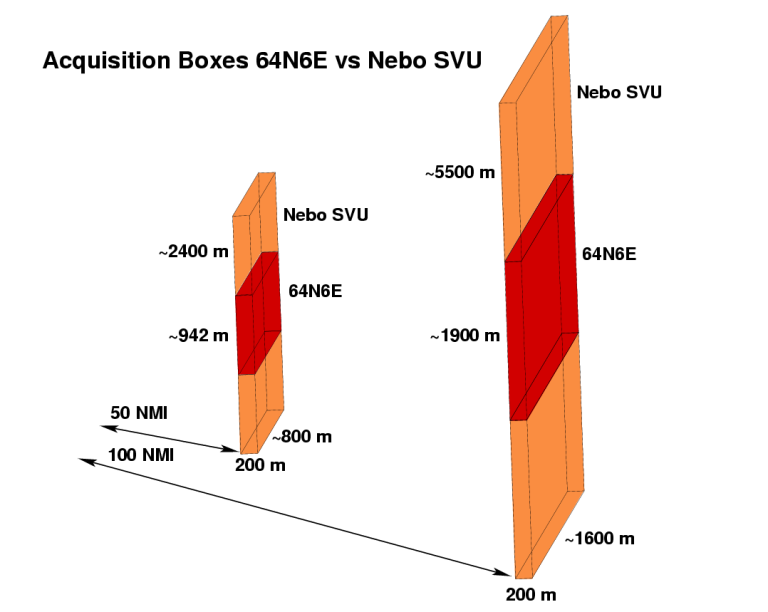
Nevertheless, VHF radars with modern processing technology have accuracy like 200 m range, 20 arcmin azimuth and 1.5º in elevation, better even in the case of higher arrays like 55Zh6 Nebo-U. From APA:
There is some inconsistency in cited error bounds for target tracking. This chart shows worst case performance (range error = 200 m; azimuth error = 0.5° and elevation error = 1.5°), with the best case range error at 100 metres and best case azimuthal error at 0.3°. This performance is of the same order as the S-band 64N6E family of PESAs used as SAM battery acquisition radars
Nebo-M is claimed to have an instrumental range of 1800 km and very long distance detection of small targets:
The goal with an EPR of 0.1 m2 (the combat unit of an RCBM or a ULTR) can be detected at a range of 600-650 km, and 0.01 m2 - 300-350 km.
Regarding the seekers, AESA models are starting to come online, see performance below for a small (100 mm diameter) one for MRAAMs. Scanning fast is not a problem for them of course. And then, switching on the seeker late is good to reduce the reaction time of the attacked plane, so a very early detection by the active seeker would also not be desirable.
As to how easy it is to hunt down a proficiently managed AD unit, the story of Zoltan Dani's 3rd missile detachment of the 250th Yugoslav Air Defense Battalion under overwhelming NATO air superiority and constant SEAD raids is a well known but still recommended read.
- Attachments
-
-
Who is online
Users browsing this forum: No registered users and 3 guests